Description
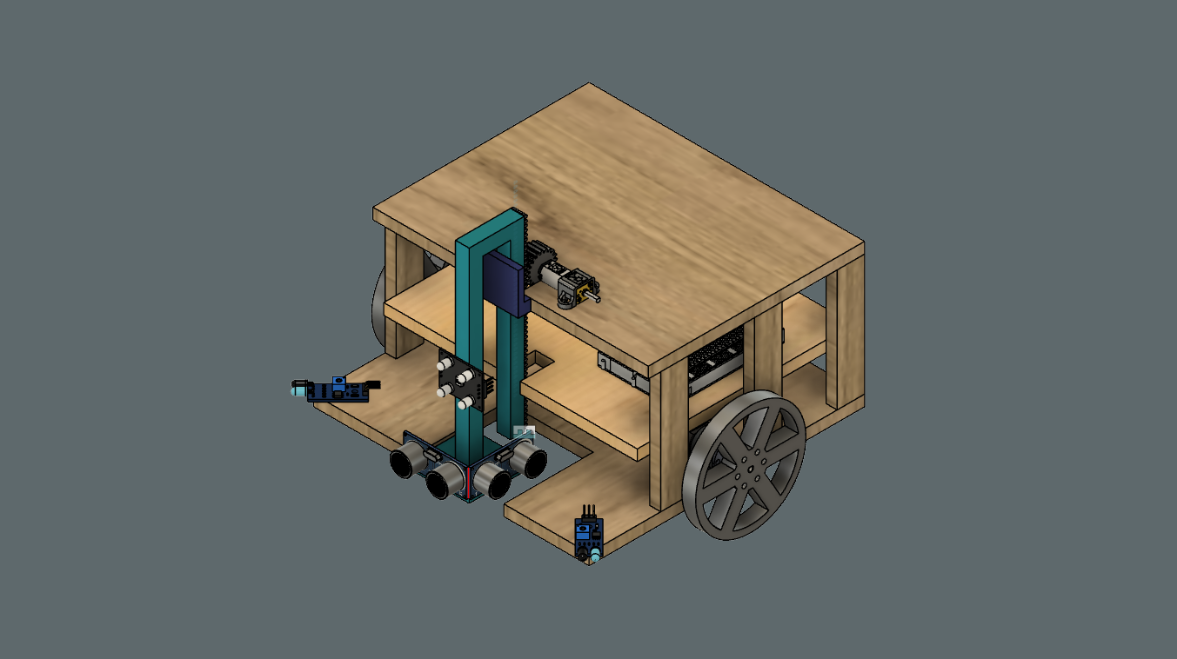
As a member of a five-person ENES100 team, I designed and built an over-terrain vehicle for a semester-long obstacle-course challenge. My responsibilities included chassis and suspension design and contribution to the Arduino-based control system.
The vehicle was developed to negotiate course features including a ramp, seesaw, and slalom-style obstacles, requiring iterative mechanical design and reliable motor-control implementation.
View final report