Description
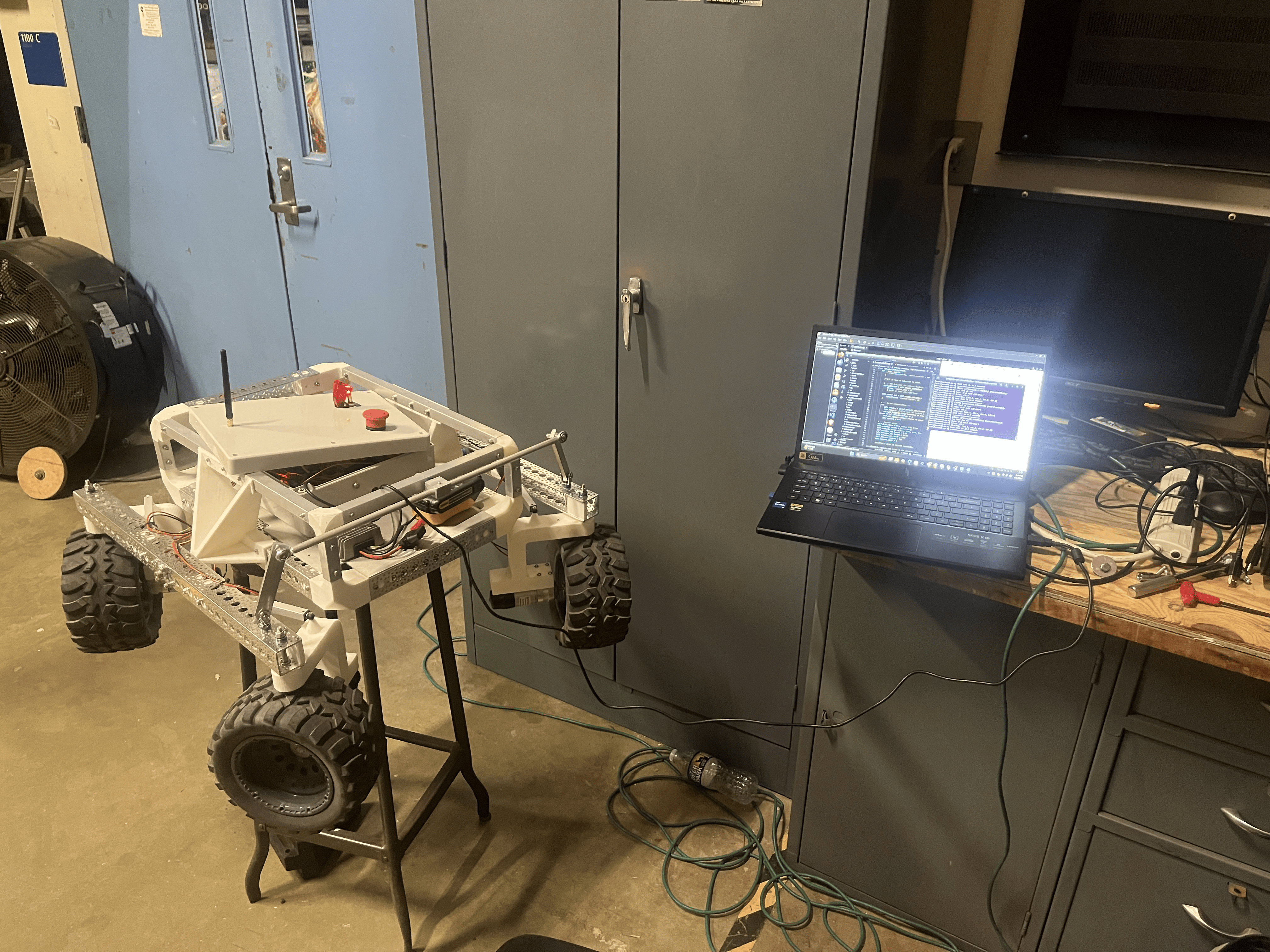
Undergraduate researcher in the Space Systems Laboratory, contributing to the ASTRA project, an Arduino-controlled over-terrain vehicle. My work focused on computer control and future autonomy development using ROS 2 and Python on a Raspberry Pi to interface with pre-existing Arduino C++ controls over serial communication.
Specific contributions would include:
- Developing and implementing low level Arduino code for computer command input via serial communication
- Developed a working Gazebo simulation for the ASTRA vehicle; Verified functionality of Crab and Ackerman steering nodes
- Implemented Arduino controlled relay to 5V (logic) bus for autonomous operation/safety
- Created documentation and reports for project progress and findings (KiCad schematics and PCB designs, WSL/Docker setup, Simulation setup, Arduino Node, Communication methods)
Unfortunatley, I was not able to start implementing the physical Pi onboard, however, I have laid the groundwork for future implementation and hope to see it come to fruition.